Rig Models¶
Coordinate Systems¶
Rig are defined by a fixed assembly of cameras that are triggered at the same instant. The following terms define such assembly and capture in OpenSfM terminology :
A RigCamera is a camera of the rig assembly defined as a combination of an existing camera model (it refers only to its ID) and its pose wrt. the rig assembly coordinate frame. RigCamera are defined in the rig_cameras.json as the following:
- {
“RIG_CAMERA_ID”: {
“translation”: translation of the rig frame wrt. the RigCamera frame “rotation”: rotation bringing a point from rig frame to the RigCamera frame “camera”: camera model ID of this RigCamera
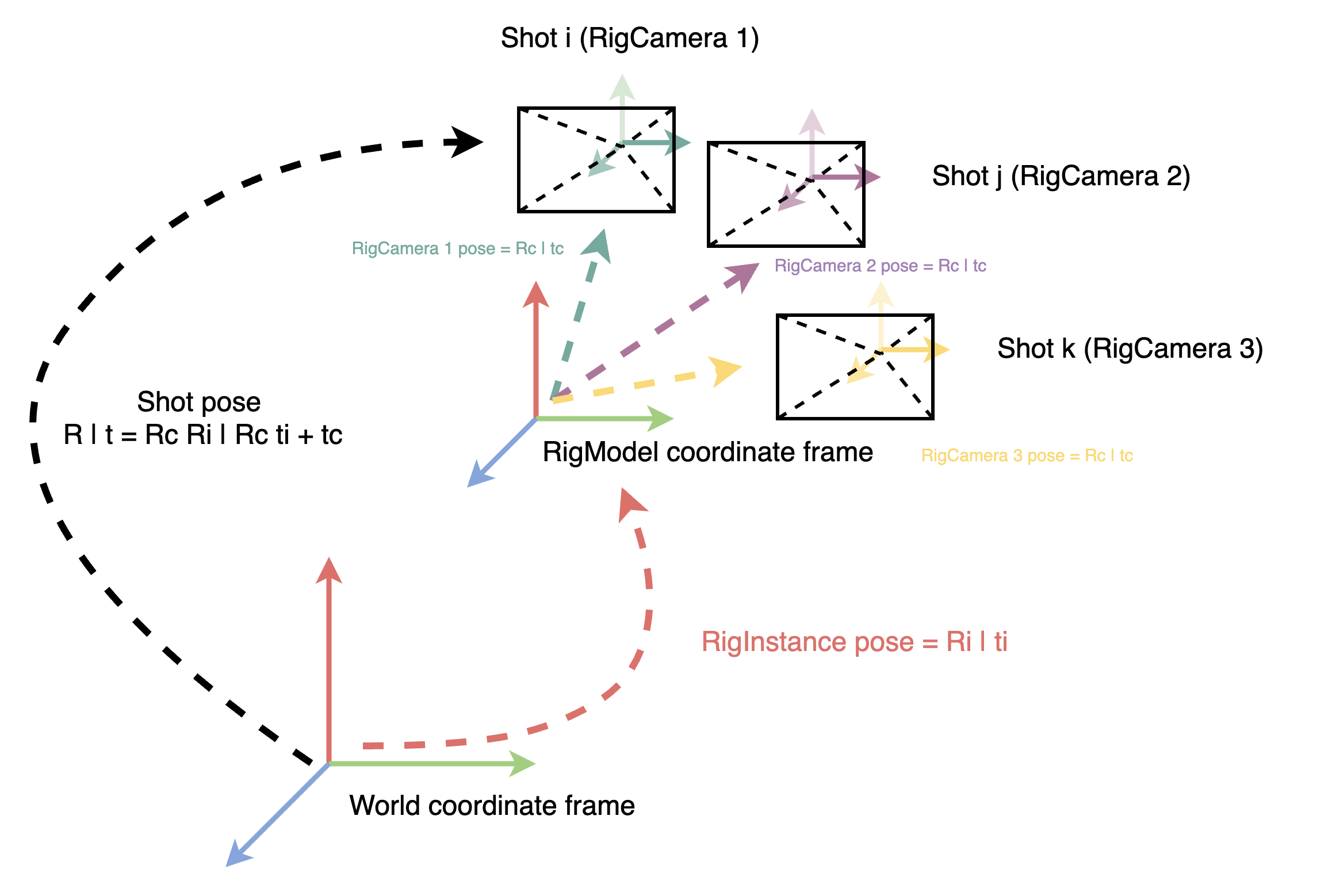
A RigInstance is a list of Shots, each of which correspond to a RigCamera of the RigModel and the actual pose of the RigModel in the world : it’s indeed an instanciation of the RigModel by combining Shots. These instances are defined in the rig_assignments.json file as follows:
{ [ [ "FILENAME", "RIG_CAMERA_ID1" ], [ "FILENAME", "RIG_CAMERA_ID2" ], ... [ "FILENAME", "RIG_CAMERA_IDn" ] ], [ [ "FILENAME", "RIG_CAMERA_ID1" ], [ "FILENAME", "RIG_CAMERA_ID2" ], ... [ "FILENAME", "RIG_CAMERA_IDn" ] ], ...
A picture is often worth many words :
Usage¶
Given the above, one can either define manually the rig_assignments.json and the rig_cameras.json, or use the OpenSfM create_rig command. This commands will take a JSON string as input to help it defines the rig instances based on the filenames, such as:
{
"RIG_CAMERA_ID1": "PATTERN1",
"RIG_CAMERA_ID2": "PATTERN2",
...
- Where “PATTERN” is the following :
A camera model ID if the method for assigning is camera. A given camera model ID correspond to one RigCamera
A REGEX with the form (.*) where the part in parenthesis identifies the camera models, when the method is pattern. For example, it would be “(RED)” or “(GREEN)” for multispectral data.
Based on this instances, it then run SfM on a small subset on the data and infers some averaged rig cameras poses, which are then written to rig_cameras.json.